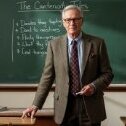
gtblum Posted January 27, 2009 Report Posted January 27, 2009 This vents into an old fireplace chimney directly above it from the furnace. The fireplace has been sealed. Is This an approved material for this application? Click to View 52.65 KB Found no tags or label.
Bill Kibbel Posted January 28, 2009 Report Posted January 28, 2009 What is it venting? Is it SS or alum.? Some flex liner manufacturers require the liner have a "base tee" for the flue connection. Some require an "A" connector w/gasket at the joint between the flue connector and liner. Insulated liners are preferred.
gtblum Posted January 28, 2009 Author Report Posted January 28, 2009 Originally posted by inspecthistoric What is it venting? Is it SS or alum.? Some flex liner manufacturers require the liner have a "base tee" for the flue connection. Some require an "A" connector w/gasket at the joint between the flue connector and liner. Insulated liners are preferred. Thank's Bill, Can't tell What flavor it is but, I googled flex liners and understand what I'm looking at now.
Bill Kibbel Posted January 28, 2009 Report Posted January 28, 2009 www.novaflex.com/information_centre/zfl ... 0Guide.pdf
Terence McCann Posted January 28, 2009 Report Posted January 28, 2009 Do you know if the liner runs the entire length of the chimney Gary?
energy star Posted January 28, 2009 Report Posted January 28, 2009 From that pic, it appears that the flue material is the same stuff you use as a dryer vent. The HVAC supply houses sell that same material in many diameters, 6,8,10,12 and so on. I only say that because I see little dings in the side of the flexible pipe in the pic. If not that it may be a fresh air duct manufactured by Z flex. I bring this to light for safety, hope I'm wrong. That does not look like a flue liner. http://www.novaflex.com/productcart/pc/ ... roduct=396
gtblum Posted January 28, 2009 Author Report Posted January 28, 2009 Originally posted by Terence McCann Do you know if the liner runs the entire length of the chimney Gary? Terence, It didn't dawn on me until Bill gave me a clue. ES, I don't know. I don't Think so. This is a college town. It's also a small town. They tend to beat nonconforming landlords asses hard here. They do annual inspections. A 23 year old's flat screen was in the way of the fireplace . I love tennants for the info but.... I Just want have to get Right. You know. Oh sorry, it's a duplex circa 1930 Thanks





Recommended Posts
Create an account or sign in to comment
You need to be a member in order to leave a comment
Create an account
Sign up for a new account in our community. It's easy!
Register a new accountSign in
Already have an account? Sign in here.
Sign In Now